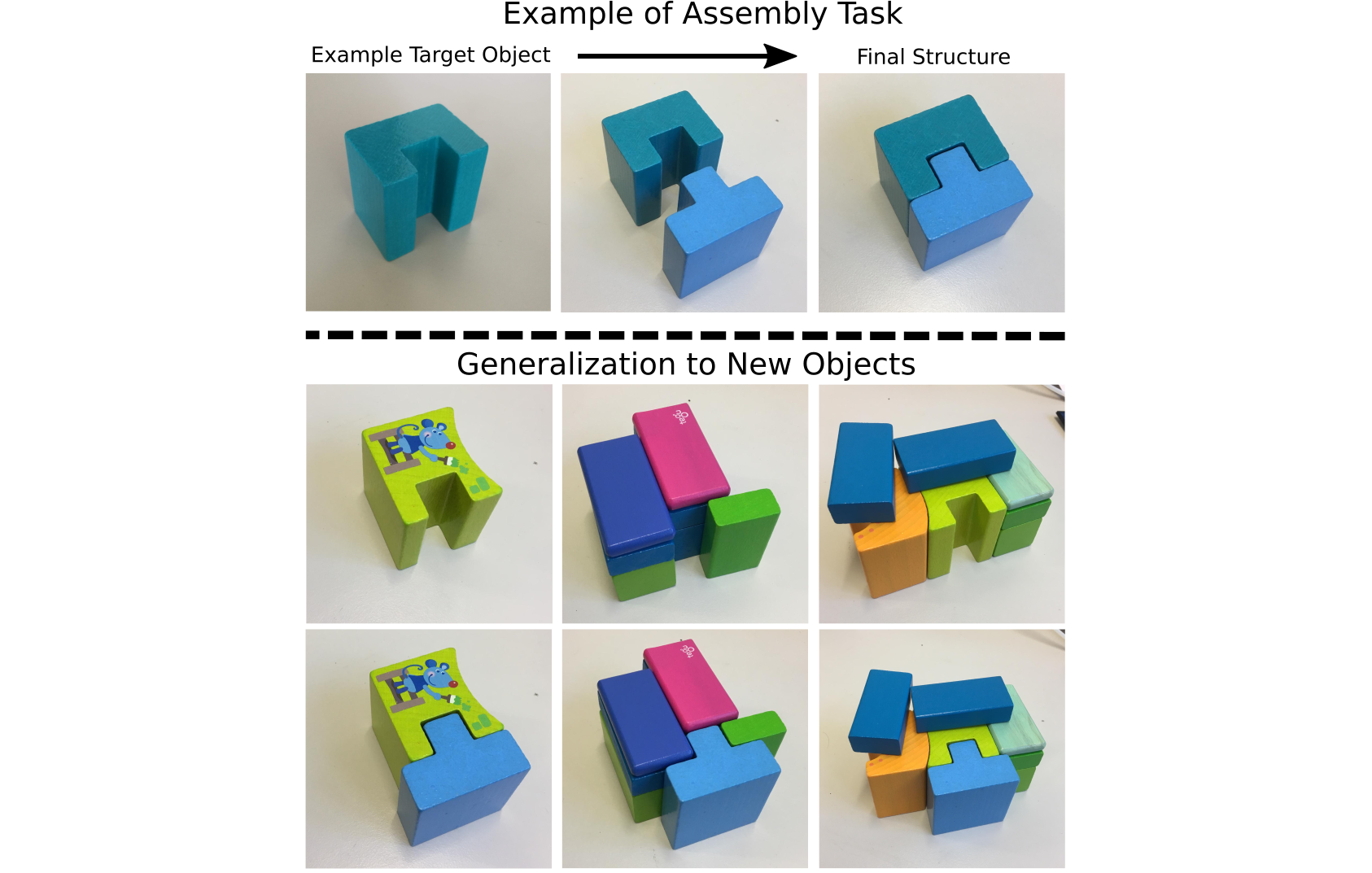
Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation
Par un écrivain mystérieux
Last updated 06 juillet 2024

Applied Sciences, Free Full-Text

PDF] Sim-to-Real 6D Object Pose Estimation via Iterative Self-training for Robotic Bin-picking
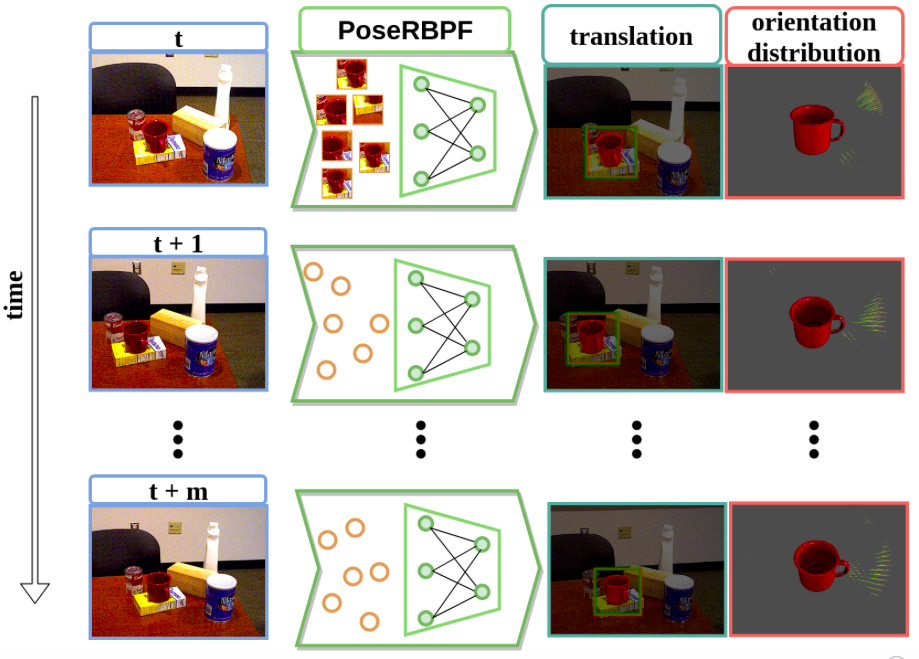
Filter gives robots greater spatial perception for 6D object pose estimation

Frontiers A Manufacturing-Oriented Intelligent Vision System Based on Deep Neural Network for Object Recognition and 6D Pose Estimation

J. Imaging, Free Full-Text

PDF] Self-supervised 6D Object Pose Estimation for Robot Manipulation

Domain Randomization for Active Pose Estimation
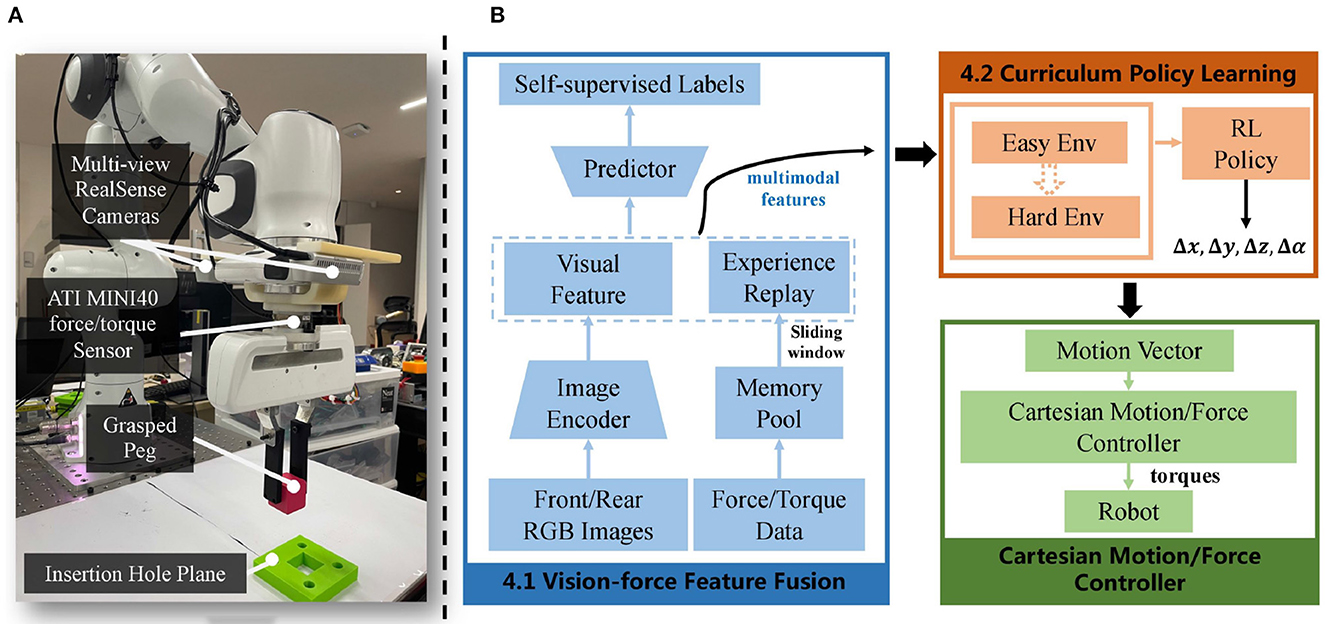
Frontiers Vision-force-fused curriculum learning for robotic contact-rich assembly tasks

PDF] Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation

Figure 5 from Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects

Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review
Recommandé pour vous
 Cube de manipulation - Ludi -Fox&Cie14 Jul 2023
Cube de manipulation - Ludi -Fox&Cie14 Jul 2023 Ludi - Cube De Manipulation - Jouets D'Éveil Bébé - Dès 10 Mois - Développe La Réflexion, La Motricité14 Jul 2023
Ludi - Cube De Manipulation - Jouets D'Éveil Bébé - Dès 10 Mois - Développe La Réflexion, La Motricité14 Jul 2023 Cube De Manipulation Ludi - Clément14 Jul 2023
Cube De Manipulation Ludi - Clément14 Jul 2023 Cube Manipulation, Superpower List Wikia14 Jul 2023
Cube Manipulation, Superpower List Wikia14 Jul 2023 CUBE: Manipulation — Sarah Maria Scicluna14 Jul 2023
CUBE: Manipulation — Sarah Maria Scicluna14 Jul 2023 3D Lake Photo Manipulation - Cube Manipulation In Photoshop - Photoshop Tutorial14 Jul 2023
3D Lake Photo Manipulation - Cube Manipulation In Photoshop - Photoshop Tutorial14 Jul 2023 A Cubic Representation of Underwater Dive - Fotovalley14 Jul 2023
A Cubic Representation of Underwater Dive - Fotovalley14 Jul 2023 Ikonka Art.KX4631 Wooden sensory manipulation cube 20.5cm - Catalog / Toys & Games / By age / - Kids online store14 Jul 2023
Ikonka Art.KX4631 Wooden sensory manipulation cube 20.5cm - Catalog / Toys & Games / By age / - Kids online store14 Jul 2023 Cube puzzle isolated on white background. This cube puzzle does not exist in real life, it is a photo manipulation. Stock Photo14 Jul 2023
Cube puzzle isolated on white background. This cube puzzle does not exist in real life, it is a photo manipulation. Stock Photo14 Jul 2023 Baby Manipulation Toy, Grasping Cube, Fabric Cube, Different Textures and Materials14 Jul 2023
Baby Manipulation Toy, Grasping Cube, Fabric Cube, Different Textures and Materials14 Jul 2023
Tu pourrais aussi aimer
 Top 30 Idées Cadeaux Noel 20 Euros pour Tous - Cadeau Plus14 Jul 2023
Top 30 Idées Cadeaux Noel 20 Euros pour Tous - Cadeau Plus14 Jul 2023 Makita - Ponceuse excentrique Makita BO5041J 300 W coffret MAKPAC 2 - Packs d'outillage électroportatif - Rue du Commerce14 Jul 2023
Makita - Ponceuse excentrique Makita BO5041J 300 W coffret MAKPAC 2 - Packs d'outillage électroportatif - Rue du Commerce14 Jul 2023 BATTERIE MOLL SERVITUDES 12V 200Ah À DÉCHARGE LENTE NEUVE LITHUIM ION LIFE PO4 - Équipement caravaning14 Jul 2023
BATTERIE MOLL SERVITUDES 12V 200Ah À DÉCHARGE LENTE NEUVE LITHUIM ION LIFE PO4 - Équipement caravaning14 Jul 2023 Graines de moutarde (1kg)14 Jul 2023
Graines de moutarde (1kg)14 Jul 2023 Barbecue en bois pour enfants avec accessoires - 72 x 35 x 70 cm14 Jul 2023
Barbecue en bois pour enfants avec accessoires - 72 x 35 x 70 cm14 Jul 2023- Nescafe Taster's Blend Instant Coffee,14 oz.14 Jul 2023
 NECA Gremlins Gizmo Singing & Dancing Plush with Sound Mogwai Soft Toy Offical14 Jul 2023
NECA Gremlins Gizmo Singing & Dancing Plush with Sound Mogwai Soft Toy Offical14 Jul 2023 ASM Clermont Rugby Ball Size 5 - Gilbert14 Jul 2023
ASM Clermont Rugby Ball Size 5 - Gilbert14 Jul 2023 Thé noir bio Chaï Masala Aux épices Terre D'oc14 Jul 2023
Thé noir bio Chaï Masala Aux épices Terre D'oc14 Jul 2023 Abba Costume for hire, rent, or rental in Dinsdale , Hamilton City in Costumes and Fancy Dress — Hire Things14 Jul 2023
Abba Costume for hire, rent, or rental in Dinsdale , Hamilton City in Costumes and Fancy Dress — Hire Things14 Jul 2023
