Actuators, Free Full-Text
Par un écrivain mystérieux
Last updated 22 juillet 2024
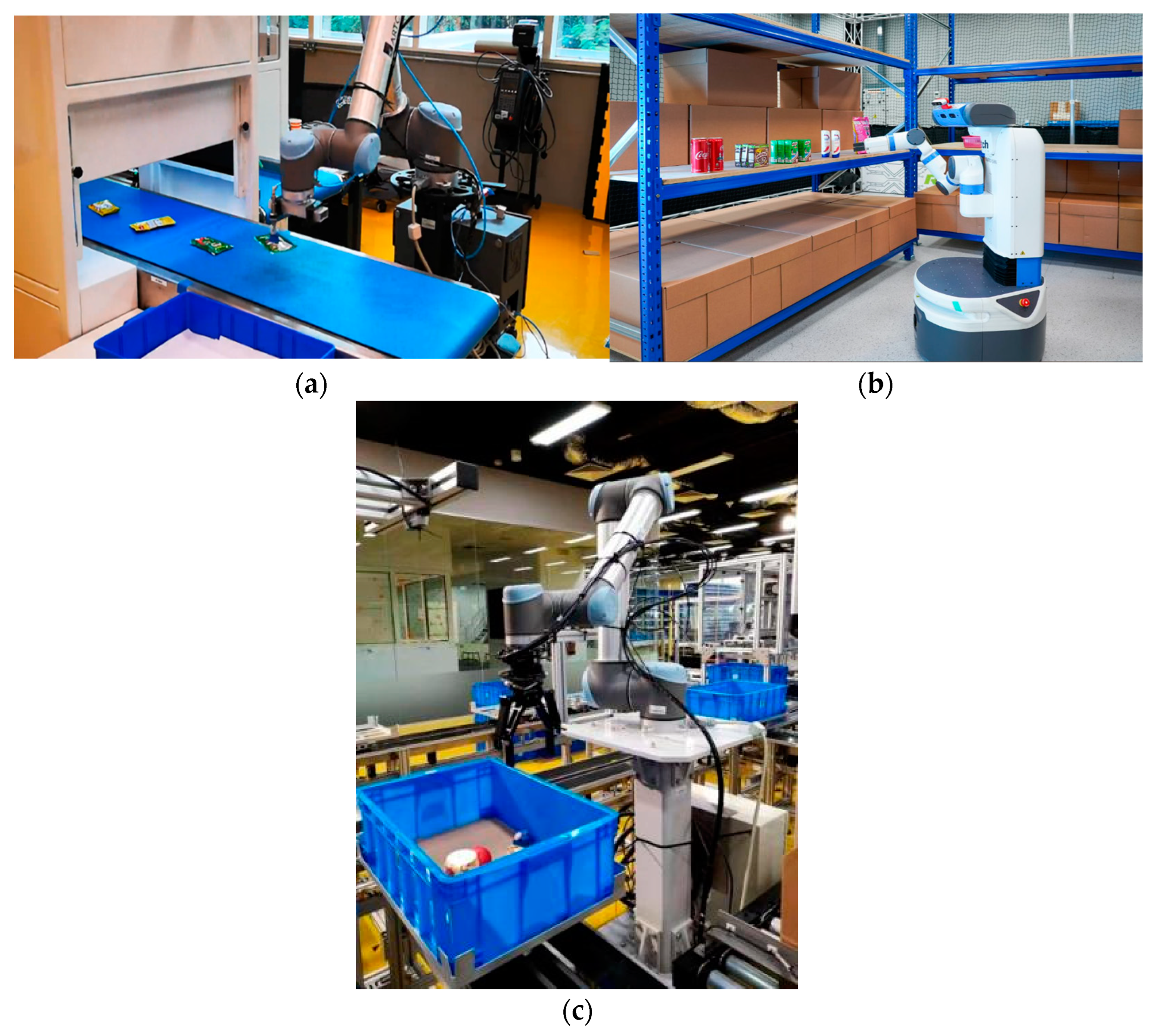
Industries such as the manufacturing or logistics industry need algorithms that are flexible to handle novel or unknown objects. Many current solutions in the market are unsuitable for grasping these objects in high-mix and low-volume scenarios. Finally, there are still gaps in terms of grasping accuracy and speed that we would like to address in this research. This project aims to improve the robotic grasping capability for novel objects with varying shapes and textures through the use of soft grippers and data-driven learning in a hyper-personalization line. A literature review was conducted to understand the tradeoffs between the deep reinforcement learning (DRL) approach and the deep learning (DL) approach. The DRL approach was found to be data-intensive, complex, and collision-prone. As a result, we opted for a data-driven approach, which to be more specific, is PointNet GPD in this project. In addition, a comprehensive market survey was performed on tactile sensors and soft grippers with consideration of factors such as price, sensitivity, simplicity, and modularity. Based on our study, we chose the Rochu two-fingered soft gripper with our customized force-sensing resistor (FSR) force sensors mounted on the fingertips due to its modularity and compatibility with tactile sensors. A software architecture was proposed, including a perception module, picking module, transfer module, and packing module. Finally, we conducted model training using a soft gripper configuration and evaluated grasping with various objects, such as fast-moving consumer goods (FMCG) products, fruits, and vegetables, which are unknown to the robot prior to grasping. The grasping accuracy was improved from 75% based on push and grasp to 80% based on PointNetGPD. This versatile grasping platform is independent of gripper configurations and robot models. Future works are proposed to further enhance tactile sensing and grasping stability.
Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Actuators Free Full Text Structure Design and MDPI - matbet yükle [2T5X7]

Recent Advances in Electrically Driven Soft Actuators across Dimensional Scales from 2D to 3D - Li - Advanced Intelligent Systems - Wiley Online Library
Linear actuator - Wikipedia

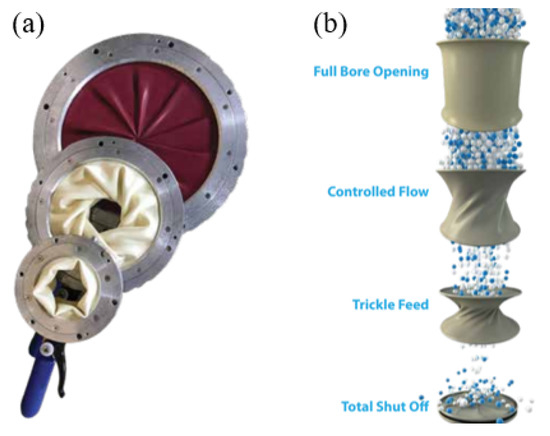
A dynamic electrically driven soft valve for control of soft hydraulic actuators

Amplifying the response of soft actuators by harnessing snap-through instabilities
Linear Actuator: What Is It? How Does It Work? Types Of
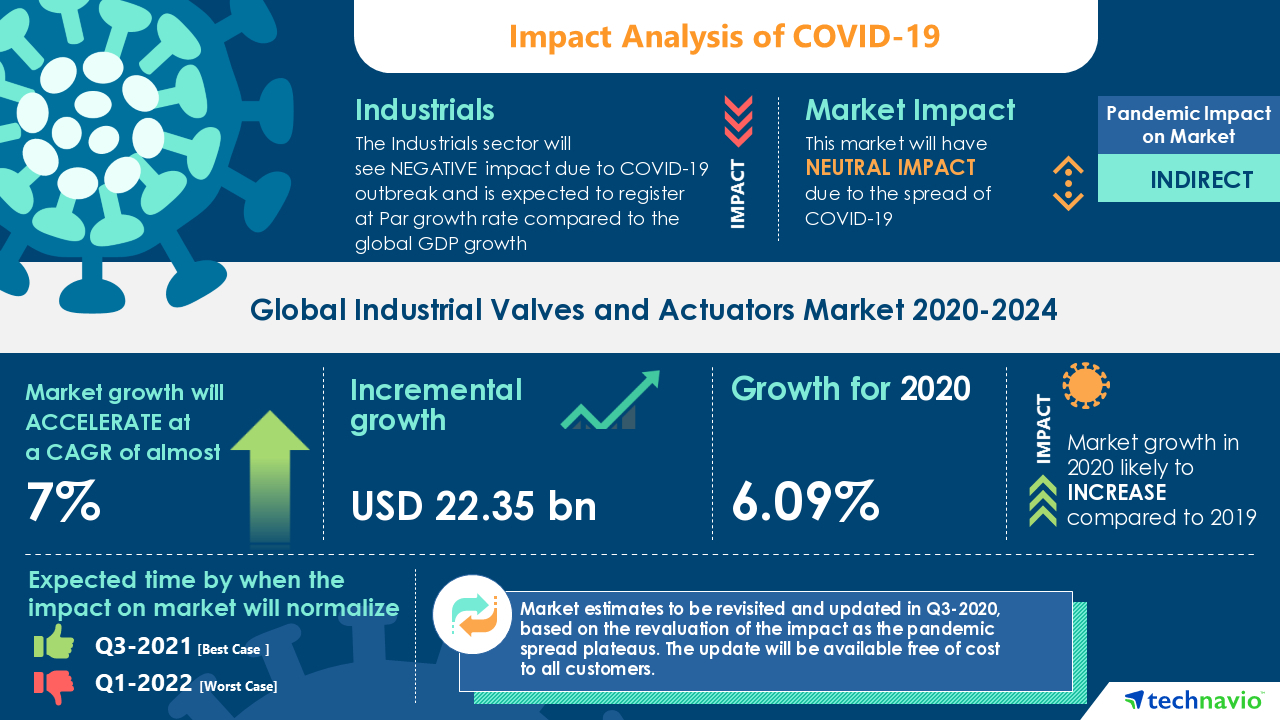
Industrial Valves And Actuators Market: COVID-19 Business Continuity Plan, APAC to Emerge as Key Region, Technavio

Sensors and Actuators B: Chemical, Journal

Hydraulic vs. Pneumatic vs. Electric Actuators

How To Pick The Right Power Supply For Linear Actuator – Progressive Automations

Bioinspired actuators with intrinsic muscle-like mechanical properties - ScienceDirect
Trickle Feed Mechanism Software - Colaboratory
Recommandé pour vous
 Polini Kit cylindre en fonte Racing 75 cc. Pour Ape 50 /FL/FL2/FL3/RST MIX14 Jul 2023
Polini Kit cylindre en fonte Racing 75 cc. Pour Ape 50 /FL/FL2/FL3/RST MIX14 Jul 2023 Film diaries: revisiting slide film – Ming Thein14 Jul 2023
Film diaries: revisiting slide film – Ming Thein14 Jul 2023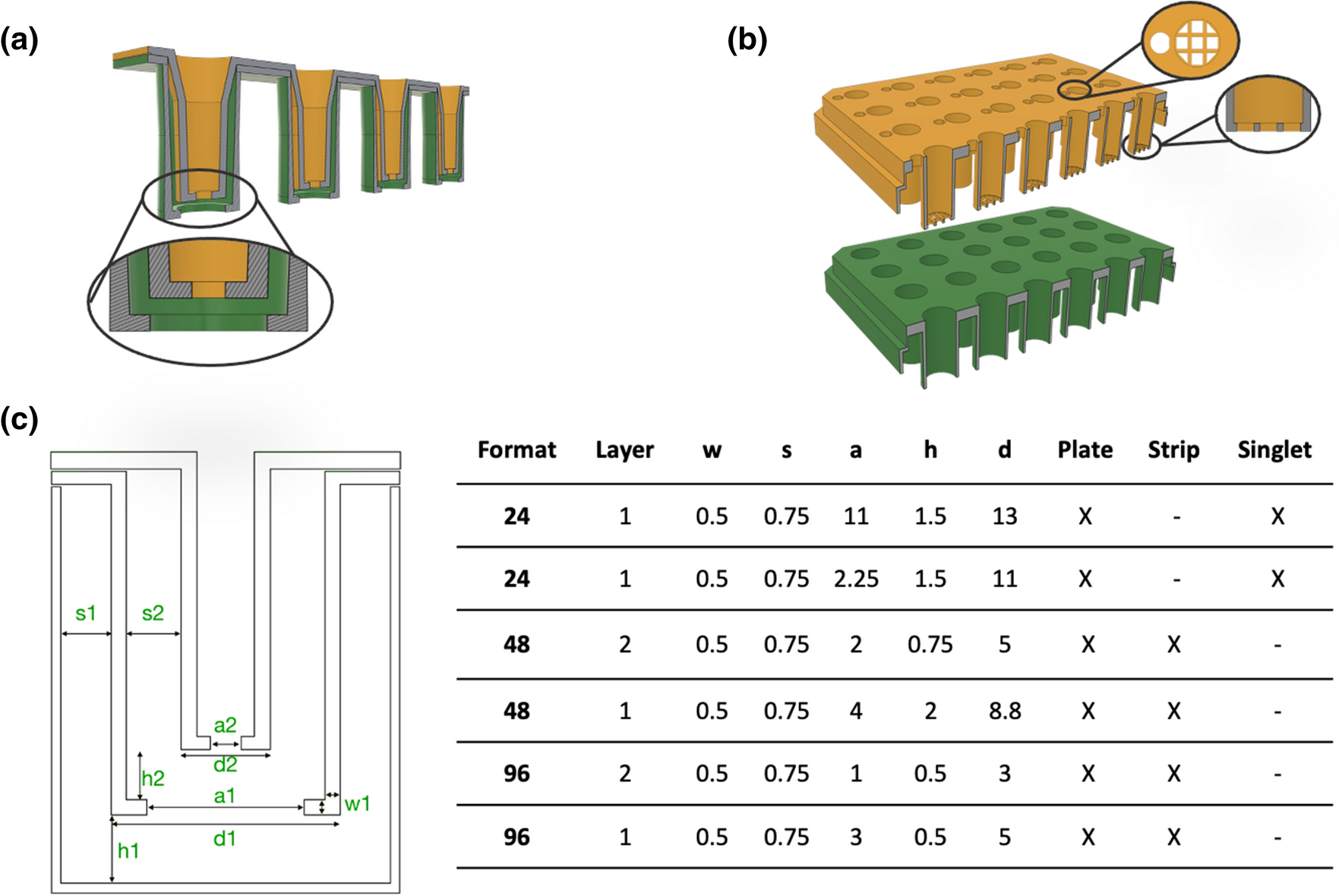 Customized 3D-printed stackable cell culture inserts tailored with bioactive membranes14 Jul 2023
Customized 3D-printed stackable cell culture inserts tailored with bioactive membranes14 Jul 2023 Boitier KLOTZ Speaklink diviseur de haut parleurs en speakON - LA BS14 Jul 2023
Boitier KLOTZ Speaklink diviseur de haut parleurs en speakON - LA BS14 Jul 2023 Graisses, lubrifiants, Huiles, lubrifiants, liquides, Auto, moto - pièces, accessoires - PicClick FR14 Jul 2023
Graisses, lubrifiants, Huiles, lubrifiants, liquides, Auto, moto - pièces, accessoires - PicClick FR14 Jul 2023 Millex pour solutions aqueuses - Filtres seringue - Filtration - Matériel de laboratoire14 Jul 2023
Millex pour solutions aqueuses - Filtres seringue - Filtration - Matériel de laboratoire14 Jul 2023 Electroménager et Cuisines équipées - Mozas Industrie14 Jul 2023
Electroménager et Cuisines équipées - Mozas Industrie14 Jul 2023 Slider de rechange LIGHTECH Rain - Nmx-diffusion14 Jul 2023
Slider de rechange LIGHTECH Rain - Nmx-diffusion14 Jul 2023 Supports filtres de laboratoire14 Jul 2023
Supports filtres de laboratoire14 Jul 2023 Thermomix friend - Cdiscount14 Jul 2023
Thermomix friend - Cdiscount14 Jul 2023
Tu pourrais aussi aimer
 New York State Foie Gras Torchon14 Jul 2023
New York State Foie Gras Torchon14 Jul 2023 Métal à repousser 220 x 163 mm pochette de 10 feuilles or/argent Pébéo chez Rougier & Plé14 Jul 2023
Métal à repousser 220 x 163 mm pochette de 10 feuilles or/argent Pébéo chez Rougier & Plé14 Jul 2023 MICRO PERFOREUSE RPM 35014 Jul 2023
MICRO PERFOREUSE RPM 35014 Jul 2023 Filament PC V0 1.75 mm Nanovia noir - 750g — Filimprimante3D14 Jul 2023
Filament PC V0 1.75 mm Nanovia noir - 750g — Filimprimante3D14 Jul 2023- PlayStation 2 Slim Console Only PS2 Gaming and Entertainment Excellence Manufacturer Refurbished14 Jul 2023
 MedoVital Bandage genou élastique avec stabilisateur central14 Jul 2023
MedoVital Bandage genou élastique avec stabilisateur central14 Jul 2023 Pierre d'argile 100% naturelle multi-surfaces pour la cuisine, la SDB14 Jul 2023
Pierre d'argile 100% naturelle multi-surfaces pour la cuisine, la SDB14 Jul 2023 Products Twist Idea14 Jul 2023
Products Twist Idea14 Jul 2023 Honey Badger 12 Plush - Crow's Castle14 Jul 2023
Honey Badger 12 Plush - Crow's Castle14 Jul 2023 Crochet de cabine avec piton à oeil - V4A, 2,95 €14 Jul 2023
Crochet de cabine avec piton à oeil - V4A, 2,95 €14 Jul 2023
